近日,广东工业大学谢胜利教授团队在北斗卫星导航完好性监测取得重要进展,提出了一种针对北斗/全球导航卫星系统接收终端的最优接收机自主完好性监测新策略,该策略通过创新性地采用极大极小估计器,优化分配完好性和连续性风险,实现了垂直保护水平的全局最小化,有效提升了导航系统在航空等安全关键领域的可用性。相关成果发表于美国国家科学院院刊(PNAS)唯一的子刊《PNAS Nexus》上,自动化学院陈辞教授和谢胜利教授为共同通讯作者。

随着全球范围内对精准导航需求的急剧增长,尤其是在低空经济蓬勃发展的背景下,卫星导航系统的完好性已成为保障各类航空器安全运行的生命线。低空空域飞行器密集,对导航系统提出了前所未有的精度和可靠性要求。当前,传统接收机自主完好性监测方法在应对多星故障、复杂干扰环境时,往往存在垂直保护水平保守、可用性不足的问题。如何设计一种既能最大限度降低垂直保护水平,又能确保在各种故障情况下维持系统完好性的监测策略,成为该领域亟待解决的关键科学问题。
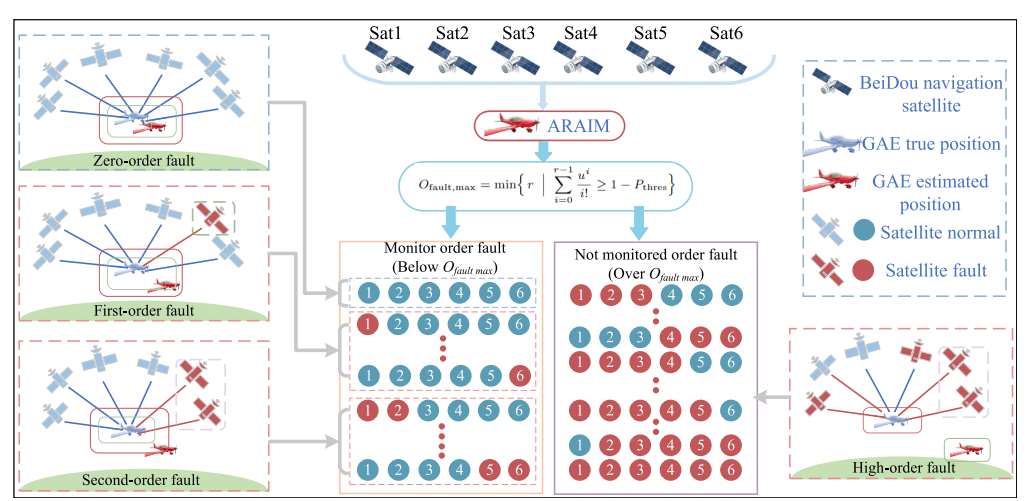
本文提出了一种旨在优化北斗/全球导航卫星系统的垂直保护水平完好性监测策略。采用极大极小估计器,通过调整全集解并最优分配完好性与连续性风险,以实现VPL的最小化。通过引入最大监测阶数机制,缓解由多星异质故障引起的组合爆炸问题。所有最坏情况故障场景均被表述为一个极大极小优化问题,并通过凸优化进行近似求解,以确保VPL的全局收敛。随着低空经济的蓬勃发展,对导航系统精度和可靠性要求日益提高,这项研究不仅超越了现代空域对导航的严苛标准,还为人口密集空域的弹性运行、进近着陆程序的精度提升,以及未来自主飞行系统的集成开辟了道路。
该研究工作得到了国家自然科学基金、广东省基础与应用基础研究基金等项目的资助。
论文链接:https://academic.oup.com/pnasnexus/article/4/11/pgaf366/8323598

















